第一章 非线性振动初步
第一节 无阻尼单摆的自由振荡
1 小角度无阻尼单摆 椭圆点
单摆,一个由摆线l联着的重量为mg的摆锤所组成的力学系统,是力学教科书中通常都要进行讨论的一个简单的动力学模型。其实我们将会看到,它具有非常复杂的动力学行为,是一个复杂系统。
我们研究一个理想的单摆,即忽略摆线l质量,认为整个系统的质量都集中在摆锤上,是一个具有集中参数的数学摆,如图1-1所示。因为如果把摆线与摆锤的质量一起计算,单摆就是一个具有分布参数的摆,与此相应的数学模型是偏微分方程,处理起来很复杂。理想单摆的数学表达是常微分方程,研究起来就要容易得多了。

图1-1 数学摆
首先忽略一切阻尼,例如忽略摆锤在运动中受到的空气阻力、摆线与悬挂点之间的摩擦力等等。由牛顿第二运动定律,摆锤质量为m的单摆的运动方程为:
![]() (1-1-1)
(1-1-1)
式中θ为摆角,g为重力加速度。将等式右边项移到到左边,并以ml相除后有:
![]()
设
![]() ,它是以单位时间的弧度为单位的角频率
,它是以单位时间的弧度为单位的角频率![]() ,则式(1-1-1)可写为:
,则式(1-1-1)可写为:
![]() (1-1-2)
(1-1-2)
由于正弦函数是非线性的,因此这是一个二阶非线性微分方程。用级数展开正弦函数:
![]() (1-1-3)
(1-1-3)
如果x很小,则可以忽略三次以上的高次项,即![]() 。这就是说当单摆的摆角很小时,式(1-1-2)变为线性微分方程:
。这就是说当单摆的摆角很小时,式(1-1-2)变为线性微分方程:
![]() (1-1-4)
(1-1-4)
方程(1-1-4)的解可以通过如下的代换解获得:
![]()
式中l为常数。代入方程(1-1-4)并消去因子![]() 后得特征方程:
后得特征方程:
![]() (1-1-5)
(1-1-5)
方程(1-1-5)的特征根为:
![]()
由此得到方程(1-1-4)的通解为:
![]() (1-1-6)
(1-1-6)
式中![]() ,
,![]() 为复常数。
为复常数。
由于描述单摆振动的![]() 应为实函数,所以常数
应为实函数,所以常数![]() ,
,![]() 必须满足条件:
必须满足条件:
![]()
于是得条件:![]() ,
,![]() 。将满足这样条件的系数
。将满足这样条件的系数![]() ,
,![]() 写成指数形式:
写成指数形式:
![]() ,
,![]()
其中P为它们的模,![]() 为幅角,则(1-1-6)式写成如下形式:
为幅角,则(1-1-6)式写成如下形式:
![]() (1-1-7)
(1-1-7)
(1-1-7)式是一个振幅为P,角频率为![]() 的简谐振动表示式,表明单摆在摆角很小时的摆动为简谐振荡,其振动波形可以用正弦曲线来表示。由
的简谐振动表示式,表明单摆在摆角很小时的摆动为简谐振荡,其振动波形可以用正弦曲线来表示。由![]() 的定义可知,它只与摆线l得长度有关,与摆锤质量为m无关,它被称为单摆的固有角频率。实际上简谐振动是一切线性振动系统的共同特征,它们都以自己的固有角频率作正弦振动。例如:线性弹簧上的振子、LC振荡回路中的电流、微波与光学谐振腔中的电磁场以及电子围绕原子核运动等等,都可以近似地用一定固有角频率的简谐振动来描述。
的定义可知,它只与摆线l得长度有关,与摆锤质量为m无关,它被称为单摆的固有角频率。实际上简谐振动是一切线性振动系统的共同特征,它们都以自己的固有角频率作正弦振动。例如:线性弹簧上的振子、LC振荡回路中的电流、微波与光学谐振腔中的电磁场以及电子围绕原子核运动等等,都可以近似地用一定固有角频率的简谐振动来描述。
式(1-1-7)是以振动的时间波形来描述系统的振荡状态,这是一种最常用的表示振动的方法,但不是唯一的方法。例如,我们可以对方程(1-1-4)进行一次积分,并为简单起见,选择时间标度使![]() ,则有
,则有
![]() (1-1-8)
(1-1-8)
式中E为积分常数,由初始条件决定。如果把![]() 和
和![]() 看作为两个变量,则方程(1-1-8)是一个圆周方程,在以
看作为两个变量,则方程(1-1-8)是一个圆周方程,在以![]() 和
和![]() 为轴的直角坐标的平面上,方程(1-1-8)是一个半径为
为轴的直角坐标的平面上,方程(1-1-8)是一个半径为![]() 的圆,振动过程以一个代表点沿圆周转动来表示,如图1-2所示。
的圆,振动过程以一个代表点沿圆周转动来表示,如图1-2所示。
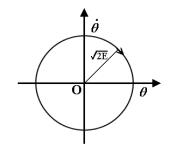
图1-2小摆角单摆的相图
如果我们不采用![]() ,那么方程(1-1-8)应该变成:
,那么方程(1-1-8)应该变成:
![]() (1-1-9)
(1-1-9)
于是,我们得到一个椭圆表达式。所以在以![]() 和
和![]() 为轴坐标的平面上,方程(1-1-9)表示了一个椭圆。
为轴坐标的平面上,方程(1-1-9)表示了一个椭圆。
用![]() 和
和![]() 为轴坐标定义的平面称为相平面,“相”的英文字是“Phase”,意为状态,因此相图即为状态图。在相平面上表示系统运动状态的方法称为相平面法。相图上的每一个点表示了系统在某一时刻状态(摆角与角速度),系统的运动状态则用相图上的点的移动来表示,点的运动轨迹称为轨线。还可以形象地认为,相空间内的相点想象成一种流体中的质点,相点的运动构成一种相流,因此相轨线是不会相交的。相流可以用平常处理流体运动的连续性方程去描述。用相空间里的轨线来表示系统的运动状态的方法是法国伟大数学家庞加莱(Poincare)于十九世纪末提出来的,现在已成为广泛使用的一种描述系统运动状态的方法,今后我们将经常使用。
为轴坐标定义的平面称为相平面,“相”的英文字是“Phase”,意为状态,因此相图即为状态图。在相平面上表示系统运动状态的方法称为相平面法。相图上的每一个点表示了系统在某一时刻状态(摆角与角速度),系统的运动状态则用相图上的点的移动来表示,点的运动轨迹称为轨线。还可以形象地认为,相空间内的相点想象成一种流体中的质点,相点的运动构成一种相流,因此相轨线是不会相交的。相流可以用平常处理流体运动的连续性方程去描述。用相空间里的轨线来表示系统的运动状态的方法是法国伟大数学家庞加莱(Poincare)于十九世纪末提出来的,现在已成为广泛使用的一种描述系统运动状态的方法,今后我们将经常使用。
因为方程(1-1-8)右边第一项可看作为系统的动能![]() ,而第二项则为系统的势能
,而第二项则为系统的势能![]() ,因此方程(1-1-8)[或方程(1-1-9)]又可写为:
,因此方程(1-1-8)[或方程(1-1-9)]又可写为:
![]()
可见积分常数E是系统的总能量。在运动过程中,K和V两者都是随时间变化的,而系统的总能量E保持不变。当K=![]() = 0时,
= 0时,![]() ,有
,有![]() ,这时摆处于静止状态,称为静止平衡。当
,这时摆处于静止状态,称为静止平衡。当![]() 时,由于系统的总能量保持不变,摆的运动状态就用确定的周期描述。可见不同的能量E相应于半径不同的圆,它构成一簇充满整个平面的同心圆[或椭圆]。显然同一个圆周[或椭圆]上的各点能量相同,所以它们又被称为等能轨道。显然坐标原点
时,由于系统的总能量保持不变,摆的运动状态就用确定的周期描述。可见不同的能量E相应于半径不同的圆,它构成一簇充满整个平面的同心圆[或椭圆]。显然同一个圆周[或椭圆]上的各点能量相同,所以它们又被称为等能轨道。显然坐标原点![]() 是轨道在能量
是轨道在能量![]() 的点,因为围绕该点的轨线是椭圆,所以人们常将为椭圆轨线围绕的静止平衡点称为‘椭圆点’。以后我们可以看到,椭圆点在说明系统的运动行为时具有重要意义。
的点,因为围绕该点的轨线是椭圆,所以人们常将为椭圆轨线围绕的静止平衡点称为‘椭圆点’。以后我们可以看到,椭圆点在说明系统的运动行为时具有重要意义。
2 任意角度无阻尼单摆振动 双曲点
上面讨论了单摆在小角度摆动时的运动状态,一般来说我们不应对单摆的摆角作任何限制,即单摆的摆角应该可以取任意数值。特别是如果设想单摆的摆线是刚性的,则摆角可以超过90度,接近或达到180度,使单摆达到倒立状态,甚至可以超过180度,使单摆以一定的角速度旋转起来。本小节就是讨论在任意摆角下单摆的运动规律。
首先我们注意摆角增大对单摆的振动周期影响。由式(1-1-7)可见,小角度单摆的振动周期为![]() ,由于摆长l与g没有变化,因此小角度单摆的振动周期是常数,与摆角是无关的。但是在摆角不是很小的情况下,单摆的振动周期还与摆角无关吗?当年伽利略在观察比萨教堂中的吊灯的摆动时发现,长度一定的摆其摆动周期不因摆角而变化,因此可以用以精确计时。惠更斯就是利用了伽利略的这个观察结果发明了摆钟。那么单摆的振动周期到底与摆角是否有关呢?我们可以看一下表1-1所列的实验数据:
,由于摆长l与g没有变化,因此小角度单摆的振动周期是常数,与摆角是无关的。但是在摆角不是很小的情况下,单摆的振动周期还与摆角无关吗?当年伽利略在观察比萨教堂中的吊灯的摆动时发现,长度一定的摆其摆动周期不因摆角而变化,因此可以用以精确计时。惠更斯就是利用了伽利略的这个观察结果发明了摆钟。那么单摆的振动周期到底与摆角是否有关呢?我们可以看一下表1-1所列的实验数据:
表1-1 单摆的振动周期与摆角的关系
|
q 0 |
0 |
5 |
10 |
20 |
30 |
45 |
|
T/T0 |
1.0000 |
1.0005 |
1.0019 |
1.0077 |
1.0174 |
1.0369 |
表中,T0是在零摆角极限下的周期。由表可见,单摆的振动周期是随摆角的增加而增加的。由表可见,在摆角为45o时单摆的振动周期T约比周期T0增加了3.7%!实际上,即便在摆角很小(![]() )的情况下,摆的周期增大效应就已存在。事实上如我们计及sinq展开式中的高次项时,即考虑非线性项时,摆角与周期无关的结论就不成立了。伽利略所得出的单摆等时性规则只不过是一种近似,这是由于当时的时间计量精度不高所造成的。
)的情况下,摆的周期增大效应就已存在。事实上如我们计及sinq展开式中的高次项时,即考虑非线性项时,摆角与周期无关的结论就不成立了。伽利略所得出的单摆等时性规则只不过是一种近似,这是由于当时的时间计量精度不高所造成的。
单摆的周期与摆角的关系的定性图象如下:由于非线性的影响,只要单摆的摆角大于零,单摆的周期就大于摆角极限下的周期T0,只是在摆角小于90度时,周期随摆角增加的变化不大;而当超过90度时,周期T随摆角增大而很快增长;当θ→180o时,摆的周期T→∞,这是非线性项的影响越来越大的缘故。振动周期的倒数是振动频率,因此振动周期在随摆角增加而增加的同时,振动频率将越来越慢。而且在摆角增加的同时,振动波形也由原正弦形状逐渐变成矩形状,从简谐振动变成了张弛振动。
在数学上,单摆的周期与其摆角的关系可以采用如下的方法求得。将方程(1-1-2)的两边乘以![]() 并对t积分,得:
并对t积分,得:
![]() (1-1-10)
(1-1-10)
式中E为积分常数。在最大角位移![]() 处,角速度
处,角速度![]() =0,因此求得积分常数E为:
=0,因此求得积分常数E为:
![]()
因此,由式(1-1-10)得:
![]() (1-1-11)
(1-1-11)
式(1-1-11)积分得:
![]() (1-1-12)
(1-1-12)
设t = 0时,![]() ,并设振动周期为T,则在
,并设振动周期为T,则在![]() 时应有
时应有![]() ,再运用半角公式,得:
,再运用半角公式,得:
![]() (1-1-13)
(1-1-13)
将![]() 表示成
表示成![]() 的函数,并写成:
的函数,并写成:
![]()
则应有:
![]()
由此可得:
![]()
因而可将式(1-1-13)变为:
![]() (1-1-14)
(1-1-14)
式中,![]() 。最后可以计算出:
。最后可以计算出:
 (1-1-15)
(1-1-15)
忽略高次项,得单摆的周期近似地为:
![]() (1-1-16)
(1-1-16)
与小角度时的情况不同,在任意摆角时我们很难给出相平面[![]() ]上单摆轨线的数学表达式。为了寻求任意摆角时单摆在相平面上的轨线形状,我们考察相平面上两个特殊点[
]上单摆轨线的数学表达式。为了寻求任意摆角时单摆在相平面上的轨线形状,我们考察相平面上两个特殊点[![]() ]和[
]和[![]() ]附近的情况。[
]附近的情况。[![]() ]实际上是相图坐标的原点,它附近的轨线形状就是前面小摆角时讨论过的情况,即由式(1-1-8)表示的椭圆,因此我们这里只寻找[
]实际上是相图坐标的原点,它附近的轨线形状就是前面小摆角时讨论过的情况,即由式(1-1-8)表示的椭圆,因此我们这里只寻找[![]() ]附近的轨线方程。
]附近的轨线方程。
考虑到![]() 是摆锤处于倒立的状态,因此可以取对铅垂的偏角f 来表示单摆在
是摆锤处于倒立的状态,因此可以取对铅垂的偏角f 来表示单摆在![]() 附近的摆角,如图1-3所示,
附近的摆角,如图1-3所示,![]() 即
即![]() 。将
。将![]() 代入单摆方程(1-1-2)有:
代入单摆方程(1-1-2)有:
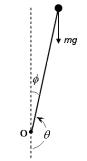
图1-3 摆角达到接近倒立的单摆
![]()
经简单运算后得:
![]()
由于f也是很小角度,可以利用![]() ,于是得:
,于是得:
![]() (1-1-17)
(1-1-17)
对式(1-1-17)积分,得:
![]() (1-1-18)
(1-1-18)
E为积分常数。在数学上式(1-1-18)是一个双曲线方程,也就是说在摆锤处于倒立点附近,相轨线是由E值确定的一条双曲线,不同的E值给出双曲线簇。当E=0时有
![]()
这是交点在[![]() ]处的两条相交的直线,它们是双曲线的渐近线,如图1-5所示。变换回[
]处的两条相交的直线,它们是双曲线的渐近线,如图1-5所示。变换回[![]() ]坐标平面时,交点[
]坐标平面时,交点[![]() ]为相图上的[
]为相图上的[![]() ]。由此可见,坐标点[
]。由此可见,坐标点[![]() ]是双曲线两条渐近线的相交点,因此该点常称为双曲奇点。双曲点是在讨论系统的运动行为时另一个具有重要意义的特殊点。
]是双曲线两条渐近线的相交点,因此该点常称为双曲奇点。双曲点是在讨论系统的运动行为时另一个具有重要意义的特殊点。
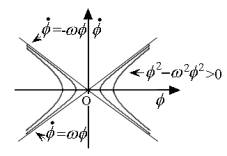
图1-4 单摆倒立附近的相轨线
3 无阻尼单摆的相图与势能曲线
由于无法推导完整的相轨线方程,我们只能从小摆角和大摆角两种特殊情况推断无阻尼单摆的完整相图。我们已经知道在坐标的原点[![]() ]附近,即低能量小角度情况,单摆的相轨线为近似椭圆形的闭合轨道。当摆角增大时,单摆能量E提高,轨线逐渐扩展开来,在横坐标的两个方向上轨线逐渐呈现出尖角状;当能量E再提高时,单摆接近到倒立状态,那种尖角状的轨线形状发展成双曲线形,于是我们得到由图1-5a给所示的单摆在任意摆角下相平面上的轨线。
]附近,即低能量小角度情况,单摆的相轨线为近似椭圆形的闭合轨道。当摆角增大时,单摆能量E提高,轨线逐渐扩展开来,在横坐标的两个方向上轨线逐渐呈现出尖角状;当能量E再提高时,单摆接近到倒立状态,那种尖角状的轨线形状发展成双曲线形,于是我们得到由图1-5a给所示的单摆在任意摆角下相平面上的轨线。
现在讨论任意摆角下单摆相轨线的特征,为此先看一下它的势能曲线。关于单摆的势能可以从基本方程(1-1-2)获得。若取![]() ,对方程(1-1-2)积分得:
,对方程(1-1-2)积分得:
![]() (1-1-19)
(1-1-19)
其中右边第一项我们已在方程(1-1-8)中见到过,它是单摆的动能K,等式右边的积分常数E应是单摆的总能量,所这是一个能量方程,左边的第二项是势能V。于是我们有:
![]() (1-1-20)
(1-1-20)
所以单摆的势能曲线![]() 是以余弦函数分布的,如图1-5b所示。
是以余弦函数分布的,如图1-5b所示。
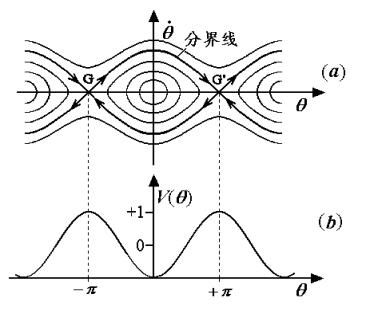
图1-5 单摆的相轨线及势能曲线
我们可由势能曲线来讨论相图上的一些特殊点的性质。由![]() 可以获得单摆的两个平衡点:即[
可以获得单摆的两个平衡点:即[![]() ]与[
]与[![]() ]。平衡点有稳定的与不稳定的之分。在[
]。平衡点有稳定的与不稳定的之分。在[![]() ]平衡点附近,当
]平衡点附近,当![]() 时,
时,![]() ;当
;当![]() 时,
时,![]() ,可知平衡点[
,可知平衡点[![]() ]是极小点,当系统离开该平衡点时,恢复力总是指向
]是极小点,当系统离开该平衡点时,恢复力总是指向![]() ,所以这是一个稳定平衡点。从相图上看,与[
,所以这是一个稳定平衡点。从相图上看,与[![]() ]平衡点相应的是单摆的静止状态。在
]平衡点相应的是单摆的静止状态。在![]() ]平衡点附近的相轨线是椭圆,该平衡点称椭圆点,因而椭圆点意味着是稳定平衡点。
]平衡点附近的相轨线是椭圆,该平衡点称椭圆点,因而椭圆点意味着是稳定平衡点。
再看另一个平衡点[![]() ],它相应于单摆的倒立状态。由图1-5b势能曲线可见,这里是势能的极大点。在该平衡点附近,例如在
],它相应于单摆的倒立状态。由图1-5b势能曲线可见,这里是势能的极大点。在该平衡点附近,例如在![]() 附近时,当
附近时,当![]() 时,
时,![]() ;当
;当![]() 时,
时,![]() 。当系统离开该平衡点时,恢复力总是指向背离
。当系统离开该平衡点时,恢复力总是指向背离![]() 的方向,所以这是不稳定的平衡点。对于[
的方向,所以这是不稳定的平衡点。对于[![]() ]可以作同样的讨论,它也是不稳定的平衡点。如果受到一个无限小的力的推动,系统就不会回复到[
]可以作同样的讨论,它也是不稳定的平衡点。如果受到一个无限小的力的推动,系统就不会回复到[![]() ]的状态,而使趋向于[
]的状态,而使趋向于[![]() ]。从相图上看,[
]。从相图上看,[![]() ]是双曲点,由此可知双曲点是不稳定的平衡点,该点也常形象地称为“鞍点”,即鞍点是不稳定的平衡点。
]是双曲点,由此可知双曲点是不稳定的平衡点,该点也常形象地称为“鞍点”,即鞍点是不稳定的平衡点。
平衡点[![]() ]和[
]和[![]() ]都是单摆的倒立点,都是相图上的双曲点,在图1-5a上分别标为G和G'点。由G点到G'点或由G'点到G点是两条联结线被称为分界线(separatrix)。由图可见,所有的闭合轨道曲线都被限制在由分界线划定的范围之内。
]都是单摆的倒立点,都是相图上的双曲点,在图1-5a上分别标为G和G'点。由G点到G'点或由G'点到G点是两条联结线被称为分界线(separatrix)。由图可见,所有的闭合轨道曲线都被限制在由分界线划定的范围之内。
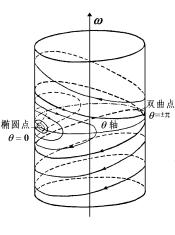
图1-6 柱面上的单摆相轨线
实际上,相图上的G和G'点对应于势能曲线在![]() 的两个极大点,因此只要摆角
的两个极大点,因此只要摆角![]() 陷于
陷于![]() 的势谷内,单摆能量E不超过势能的两个极大值,相轨道都是一些闭合回线,单摆都作周期振动。当摆角超过
的势谷内,单摆能量E不超过势能的两个极大值,相轨道都是一些闭合回线,单摆都作周期振动。当摆角超过![]() 进入到中心势谷左右两侧的诸势谷时,单摆能量E将超过势能曲线上的极大值,轨道就不再闭合,这时单摆作向左或向右方向的旋转运动,而不再作周期振动了。
进入到中心势谷左右两侧的诸势谷时,单摆能量E将超过势能曲线上的极大值,轨道就不再闭合,这时单摆作向左或向右方向的旋转运动,而不再作周期振动了。
然而,图1-5a的横坐标θ是以2p为周期的,摆角![]() 实际上对应着单摆的同一个倒立位置,当我们把相图上的G(-
实际上对应着单摆的同一个倒立位置,当我们把相图上的G(-![]() )点与G'(
)点与G'(![]() )点重迭到一起时,就相当于把相平面卷缩成为一个柱面。所有的相轨线都将呈现在这样一个柱面上,如图1-6所示。反过来说,平面上的相轨线是柱面上的相轨线的展开图。
)点重迭到一起时,就相当于把相平面卷缩成为一个柱面。所有的相轨线都将呈现在这样一个柱面上,如图1-6所示。反过来说,平面上的相轨线是柱面上的相轨线的展开图。
第二节 阻尼振子
1 阻尼单摆 不动点
上面讨论的无阻尼单摆实际上是不存在的,在一个真实的力学系统中阻尼总是存在的。一个很小的阻尼,即使在短时间之内可以将其阻尼忽略,但在进行足够长时间的观察中,阻尼就不能不计了,单摆的摆动最终会因阻尼而停止下来。
在小阻尼下,可以认为单摆所受到的阻尼力与摆的速度![]() 成正比。因此,当在单摆运动方程中加进了阻尼力项后可以写为:
成正比。因此,当在单摆运动方程中加进了阻尼力项后可以写为:
![]()
![]() (1-2-1)
(1-2-1)
式中第二项就是摆受到的阻尼力,g
为阻尼系数,在小阻尼下![]() 可视为常数。取β=
可视为常数。取β=![]() 为无量纲阻尼系数,如果摆角很小,满足
为无量纲阻尼系数,如果摆角很小,满足![]() ,式(1-2-1)变为:
,式(1-2-1)变为:
![]() (1-2-2)
(1-2-2)
方程(1-2-2)为一齐次方程,设其解具有形式:
![]()
l为待定常数。将式其代入方程(1-2-2)后得特征方程:
![]() (1-2-3)
(1-2-3)
方程(1-2-3)的得特征根为:
![]()
设单摆是小阻尼的,这时上式根号下的值是负的,取
![]()
于是特征方程方程(1-2-3)的根可写为:
![]() (1-2-4)
(1-2-4)
经如此代换以后,方程(1-2-2)的通解为:
![]()
注意到式中括号内的形式与式(1-1-6)相同,所以可以将括号内的部分表示为与式(1-1-7)相同的形式。这样在小阻尼条件下阻尼单摆的解可写成如下形式:
![]() (1-2-5)
(1-2-5)
由式(1-2-5)可知,与无阻尼单摆相比,阻尼单摆是幅度随时间作指数衰减的周期振荡,而且振动频率![]() 因阻尼而减小。
因阻尼而减小。
为了给出在相平面上的图象,取(1-2-5)式的微分:
![]() (1-2-6)
(1-2-6)
并将相平面坐标[![]() ]变量按下式变换为坐标[u,v]变量的平面:
]变量按下式变换为坐标[u,v]变量的平面:
![]()
![]()
式中:![]() ,
,![]() 为[u,v]相平面上轨线的矢径,
为[u,v]相平面上轨线的矢径,![]() 为轨线的幅角。由于
为轨线的幅角。由于![]() ,说明单摆轨线的矢径
,说明单摆轨线的矢径![]() 随时间t指数缩短。
随时间t指数缩短。
由于相平面[u,v]不含时间,所以需要在![]() 式中的t消去。利用
式中的t消去。利用![]() 得:
得:
![]()
代入![]() 式,并取
式,并取![]() ,得:
,得:
![]() (1-2-7)
(1-2-7)
式(1-2-7)表明,与无阻尼单摆不同,阻尼单摆的轨线的矢径![]() 是随转角
是随转角![]() 的增加而缩短的。所以在[u,v]平面上阻尼单摆的相轨线是向内旋转的对数螺旋线簇,如图1-7所示。如果变换回[
的增加而缩短的。所以在[u,v]平面上阻尼单摆的相轨线是向内旋转的对数螺旋线簇,如图1-7所示。如果变换回[![]() ]平面,相轨道也是与此类似的对数螺旋线簇。由此可见,阻尼使图1-2所示的单摆的椭圆形轨道破裂,无论阻尼是如何微小,阻尼都会将线性系统的闭合相轨线完全破坏掉。
]平面,相轨道也是与此类似的对数螺旋线簇。由此可见,阻尼使图1-2所示的单摆的椭圆形轨道破裂,无论阻尼是如何微小,阻尼都会将线性系统的闭合相轨线完全破坏掉。
阻尼单摆的相轨线的矢径![]() 作对数衰减的原因是由于系统的能量耗散。由于耗散,无论初始时刻从相平面上的哪一点出发,在经过若干次旋转之后,最终都会趋向于坐标原点。因此人们形象地称原点O为“吸引子”,它把相空间里的点吸引过来。这是最简单的一类吸引子,称为零维吸引子,因为数学上几何点的维数为零。代表点运动到原点O,相应于单摆静止下来,所以原点O又称不动点。
作对数衰减的原因是由于系统的能量耗散。由于耗散,无论初始时刻从相平面上的哪一点出发,在经过若干次旋转之后,最终都会趋向于坐标原点。因此人们形象地称原点O为“吸引子”,它把相空间里的点吸引过来。这是最简单的一类吸引子,称为零维吸引子,因为数学上几何点的维数为零。代表点运动到原点O,相应于单摆静止下来,所以原点O又称不动点。

图1-7 小阻尼单摆的相轨线
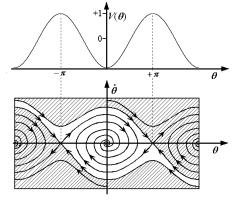
图1-8 阻尼单摆的扩展相图
将阻尼对闭合相轨线破坏结果扩大到任意摆角的阻尼单摆上,就可以画出任意摆角下的阻尼单摆相图,如图1-8所示。如图,中心部分(坐标原点附近)的轨线和小摆角的线性情况相似,相轨线是向内旋转的对数螺旋线。其次,我们注意一下鞍点和分界线上的情况。由图可见,鞍点的位置仍在![]() 处,整相平面被通过两个鞍点G与G'的轨线分隔成了三个不同的区域。假如单摆从倒立开始往下摆,由于阻尼引起的能量耗散,它不可能摆动到原有的高度。这样从一个鞍点(例如G)出发的轨线因能量耗散而向内卷缩,因而到不了另一个鞍点G',原有的分界线也被破坏了。从从相流观点去看,所有中间区域(没有阴影线)内的相点都回流向坐标原点。原点是该区域的不动点,也是该区域的吸引子,这个中间区域也被叫做原点吸引子的吸引域。另外两个区域(有阴影线的上下两个区域)也有相应的吸引子,它们分别处在该图的左(
处,整相平面被通过两个鞍点G与G'的轨线分隔成了三个不同的区域。假如单摆从倒立开始往下摆,由于阻尼引起的能量耗散,它不可能摆动到原有的高度。这样从一个鞍点(例如G)出发的轨线因能量耗散而向内卷缩,因而到不了另一个鞍点G',原有的分界线也被破坏了。从从相流观点去看,所有中间区域(没有阴影线)内的相点都回流向坐标原点。原点是该区域的不动点,也是该区域的吸引子,这个中间区域也被叫做原点吸引子的吸引域。另外两个区域(有阴影线的上下两个区域)也有相应的吸引子,它们分别处在该图的左(![]() )右(
)右(![]() )两侧。
)两侧。
2 无驱杜芬方程
通常,把含有立方项恢复力的非线性振子称为杜芬(Duffing)振子。例如,如果考虑受驱单摆方程中的弱非线性,即摆角不大时取sinq的级数展开式的前两项,sinq≈![]() ,就是一种特殊形式的杜芬振子。这时的单摆方程变为软弹簧杜芬方程:
,就是一种特殊形式的杜芬振子。这时的单摆方程变为软弹簧杜芬方程:
![]() (1-2-8)
(1-2-8)
![]() 为小摆角下的自振频率。方程(1-2-8)称为软弹簧杜芬方程的原因是方程中的恢复力(
为小摆角下的自振频率。方程(1-2-8)称为软弹簧杜芬方程的原因是方程中的恢复力(![]() )比线性弹簧振子
)比线性弹簧振子
![]()
中的线性恢复力(x)还要小。
这里我们研究一类特殊的杜芬方程,它与方程(1-2-8)的不同在于线性恢复力项是负的,即:
![]() (1-2-9)
(1-2-9)
在实验上,描述方程(1-2-9)的振动系统可以图1-9所示的装置来演示。如图示,固定在框架上的一条弹性板,其端点受到左右两块磁铁吸引,而框架则受一正弦驱动力作用。通过装置在弹性板跟部的应变片可以输出反映弹性板振动的信号。方程中系数![]() 由磁铁的吸力调整,在弱磁铁吸力时参数
由磁铁的吸力调整,在弱磁铁吸力时参数![]() ,吸力强时参数
,吸力强时参数![]() 。
。
我们讨论无驱动力杜芬方程的特性。设系数![]() ,先考虑
,先考虑![]() 的无阻尼情况,则无驱动力作用的杜芬方程为:
的无阻尼情况,则无驱动力作用的杜芬方程为:
![]()
进行积分得:
![]() (1-2-10)
(1-2-10)
式中E为积分常数。如果将方程(1-2-10)与小摆角单摆方程(1-1-8)对比一下可以发现,该方程也是一个能量方程,第一项为系统的动能K,第二项则为系统的势能V:
![]() (1-2-11)
(1-2-11)
积分常数E则为系统的总能量。
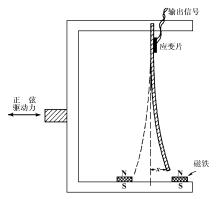
图1-9 在磁性力作用下的弹性板
如弱磁铁吸力时![]() ,从
,从![]() 可知系统只有一个
可知系统只有一个![]() 的平衡点,它相应于势能的最小点,因此是稳定的平衡点。如果参数
的平衡点,它相应于势能的最小点,因此是稳定的平衡点。如果参数![]() ,则系统就有三个的平衡点,
,则系统就有三个的平衡点,![]() 与
与![]() ,其中
,其中![]() 两个平衡点相应于势能的极小点,因此是稳定的平衡点,而
两个平衡点相应于势能的极小点,因此是稳定的平衡点,而![]() 的平衡点相应于势能的极大点,是不稳定的平衡点,是鞍点,说明系统的两个势谷为一个势垒所隔开。图1-10给出了方程中
的平衡点相应于势能的极大点,是不稳定的平衡点,是鞍点,说明系统的两个势谷为一个势垒所隔开。图1-10给出了方程中![]() 与
与![]() 两种情况的势能曲线。上述情况说明杜芬方程的解在从参数
两种情况的势能曲线。上述情况说明杜芬方程的解在从参数![]() 变到
变到![]() 过程中在
过程中在![]() 处发生了分裂。这种由一个稳定解分裂为两个稳定解与一个不稳定解在数学上称为叉式分岔。关于数学分岔下面我们将会有更详细一点的介绍。从空间的对称性来分析,杜芬方程的相轨线随着参数
处发生了分裂。这种由一个稳定解分裂为两个稳定解与一个不稳定解在数学上称为叉式分岔。关于数学分岔下面我们将会有更详细一点的介绍。从空间的对称性来分析,杜芬方程的相轨线随着参数![]() 由负变正,其对称性发生了突变,从先前一个振动中心变成两个中心,原来对称的轨线现在变为不对称了。这种因参数变化而导致对称性破坏的情况称为对称性破缺(Symmetry breaking)。对称性破缺与分岔在非线性物理中是经常可以遇到的,而且分岔还是一个动力学系统从规则运动走向非规则运动的主要方式之一。
由负变正,其对称性发生了突变,从先前一个振动中心变成两个中心,原来对称的轨线现在变为不对称了。这种因参数变化而导致对称性破坏的情况称为对称性破缺(Symmetry breaking)。对称性破缺与分岔在非线性物理中是经常可以遇到的,而且分岔还是一个动力学系统从规则运动走向非规则运动的主要方式之一。

a
![]() b
b ![]()
图1-10 杜芬方程的势能曲线
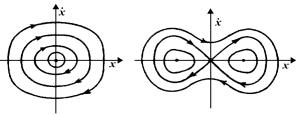
根据前面单摆的势能曲线与相图间的关系,我们可以容易地从杜芬方程势能曲线的形状画出它在(![]() )相平面上的相轨线。图1-11给出了无阻尼(
)相平面上的相轨线。图1-11给出了无阻尼(![]() )杜芬方程在
)杜芬方程在![]() 与
与![]() 两种情况下在(
两种情况下在(![]() )相平面上相轨线形状。对于
)相平面上相轨线形状。对于![]() ,则坐标原点(
,则坐标原点(![]() )是椭圆点,其附近是闭合的椭圆轨道(图1-11a),与无阻尼单摆相类似,随系统能量E的提高,椭圆轨道的半径逐渐加大,并且逐步偏离正规的椭圆形状。
)是椭圆点,其附近是闭合的椭圆轨道(图1-11a),与无阻尼单摆相类似,随系统能量E的提高,椭圆轨道的半径逐渐加大,并且逐步偏离正规的椭圆形状。![]() 时的相轨线如图1-11b所示。这时坐标原点(
时的相轨线如图1-11b所示。这时坐标原点(![]() )是鞍点,其邻近的相轨线是双曲线,而在坐标
)是鞍点,其邻近的相轨线是双曲线,而在坐标![]() 处是椭圆点,因此围绕坐标点
处是椭圆点,因此围绕坐标点![]() 是闭合的椭圆形轨道,但在离得较远处的轨道将偏离椭圆形状,象一对尖头相对的两个鸡蛋形状,因为临近坐标原点的地方轨线要呈双曲线。通过坐标原点的相轨线是两条相交的界轨线。从界轨线的走向来看,有两条轨线走向坐标原点,而另两条则离开该点,如果沿一条轨线从坐标原点出发,则在绕了一圈以后又回到了坐标原点。以后我们要讲到象这样的双曲点称为同宿点。
是闭合的椭圆形轨道,但在离得较远处的轨道将偏离椭圆形状,象一对尖头相对的两个鸡蛋形状,因为临近坐标原点的地方轨线要呈双曲线。通过坐标原点的相轨线是两条相交的界轨线。从界轨线的走向来看,有两条轨线走向坐标原点,而另两条则离开该点,如果沿一条轨线从坐标原点出发,则在绕了一圈以后又回到了坐标原点。以后我们要讲到象这样的双曲点称为同宿点。
a
![]() b
b ![]()
图1-11 无阻尼(![]() )杜芬方程的相轨线
)杜芬方程的相轨线
如果考虑![]() 的有阻尼情况。与阻尼单摆的情况相同,这时所有闭合的相轨线都破裂成内卷缩的螺旋线。在
的有阻尼情况。与阻尼单摆的情况相同,这时所有闭合的相轨线都破裂成内卷缩的螺旋线。在![]() 的情况下,坐标原点(
的情况下,坐标原点(![]() )是不动点,相平面上任何一个相点都趋向于坐标原点,因此它是整个相平面的吸引子,是零维吸引子,如图1-12a。在
)是不动点,相平面上任何一个相点都趋向于坐标原点,因此它是整个相平面的吸引子,是零维吸引子,如图1-12a。在![]() 的情况下,坐标原点是鞍点,而坐标(
的情况下,坐标原点是鞍点,而坐标(![]() )处是两个不动点,是吸引子。整个相平面被进入坐标原点的两条轨线分隔成两个区域,两个不同区中的相点分别流向左或右的两个不动点。如图1-12b所示,打阴影线的区域是左边吸引子的吸引域,而没有阴影线的区域是右边吸引子的吸引域。
)处是两个不动点,是吸引子。整个相平面被进入坐标原点的两条轨线分隔成两个区域,两个不同区中的相点分别流向左或右的两个不动点。如图1-12b所示,打阴影线的区域是左边吸引子的吸引域,而没有阴影线的区域是右边吸引子的吸引域。

a
![]() b
b ![]()
图1-12 有阻尼(![]() )杜芬方程的相轨线
)杜芬方程的相轨线
3 非线性阻尼 范德玻耳方程
前面我们研究过具有常阻尼系数的单摆方程(1-2-2),那里方程的一阶导数项的系数是一正的常数![]() ,它导致了单摆随时间作衰减振动。现在研究一个具有可变非线性阻尼的微分方程,即:
,它导致了单摆随时间作衰减振动。现在研究一个具有可变非线性阻尼的微分方程,即:
![]() (1-2-12)
(1-2-12)
可见方程的一阶导数项的系数是x的平方函数并乘上一个小数e,即![]() ,所以是一种可变的非线性阻尼。它是为描述LC回路电子管振荡器由范德玻耳于1928年建立的,式中
,所以是一种可变的非线性阻尼。它是为描述LC回路电子管振荡器由范德玻耳于1928年建立的,式中![]() 为回路的固有频率。这个方程现在是数学物理方程中的一个基本方程,称为范德玻耳方程。本小节就是讨论可变非线性阻尼
为回路的固有频率。这个方程现在是数学物理方程中的一个基本方程,称为范德玻耳方程。本小节就是讨论可变非线性阻尼![]() 会给系统的动力学行为带来一些什么样的变化?
会给系统的动力学行为带来一些什么样的变化?
由于非线性,直接解方程(1-2-12)是很困难的,我们只好采取近似解。首先可以见到,当e=0时,该式与无阻尼小幅度单摆方程(1-2-2)是一样的。仿照方程(1-1-4)的解(1-1-7)的形式,当e≠0时我们取式(1-2-12)的解为:
![]() (1-2-13)
(1-2-13)
其中振幅A是一个待解数。对式(1-2-13)求一阶与二阶导数:
![]() (1-2-14)
(1-2-14)
![]() (1-2-15)
(1-2-15)
将方程(1-2-12)的一阶导数项移到方程的右边:
![]() (1-2-16)
(1-2-16)
再将式一阶与二阶导数分别代入上面方程的两边,得:
![]()
![]() (1-2-17)
(1-2-17)
上面方程的两边的同次谐波项系数应相等,即有:
![]()
![]()
由前两式可得:
![]() 和
和 ![]() (1-2-18)
(1-2-18)
![]() 为定常振幅。我们注意到式(1-2-17)右边的三次谐波项与基频项相比,应该是个小项,可以将其略去。由式(1-2-17)并利用式(1-2-14),方程(1-2-16)的右边近似于:
为定常振幅。我们注意到式(1-2-17)右边的三次谐波项与基频项相比,应该是个小项,可以将其略去。由式(1-2-17)并利用式(1-2-14),方程(1-2-16)的右边近似于:
![]()
将其代入方程(1-2-12),就得到含有待解振幅A的线性化方程:
![]() (1-2-19)
(1-2-19)
由于方程(1-2-19)是根据谐波平衡原理,即令同次谐波系数相等以后取其一次项得到的近似方程,所以称为谐波线性化方程。
注意到方程(1-2-19)形式上与阻尼单摆方程间的类似,因此在解该方程时可以将其解写为:
![]() (1-2-20)
(1-2-20)
式中![]() 称初始振幅,
称初始振幅,![]() 称为等价阻尼系数,
称为等价阻尼系数,![]() 。与阻尼单摆不同,等价阻尼系数
。与阻尼单摆不同,等价阻尼系数![]() 不是常数,它与振动的振幅有关:
不是常数,它与振动的振幅有关:
![]() (1-2-21)
(1-2-21)
![]() 为自振动频率,它是振幅的函数:
为自振动频率,它是振幅的函数:
 (1-2-22)
(1-2-22)
振动频率这种随振幅变化的特性称为非线性系统自振动的非等时性。
由(1-2-20)可知,等价阻尼系数![]() 的符号决定了系统的振动随时间变化的行为。而(1-2-21)告诉我们,等价阻尼系数
的符号决定了系统的振动随时间变化的行为。而(1-2-21)告诉我们,等价阻尼系数![]() 的符号与振幅A值有关,它可正可负。当
的符号与振幅A值有关,它可正可负。当![]() (= 2),
(= 2),![]()
![]() 0,则系统作衰减振动,此时振动频率
0,则系统作衰减振动,此时振动频率![]() ,而且在
,而且在![]() 时,
时,![]() 将快速地衰减;
将快速地衰减;
当![]() 时,
时,![]() <0,则系统作增幅振动,此时振动频率
<0,则系统作增幅振动,此时振动频率![]() ,当
,当![]() 时,
时,![]() 将非常快速地增长;
将非常快速地增长;
当![]() 时,
时,![]() =0,这时系统作等幅振动,系统的振动频率
=0,这时系统作等幅振动,系统的振动频率![]() ;在
;在![]() 时,
时,![]() 不管是衰减还是增幅都是非常缓慢的。
不管是衰减还是增幅都是非常缓慢的。
解式(1-2-20)说明,只要初振幅不等于零,那么不论其量值如何,振动的振幅总是趋向于一个稳定的幅值![]() 发展。这种类型的振荡器称为自持振荡器,其解称为定常解。图1-13a和图1-13b分别给出了
发展。这种类型的振荡器称为自持振荡器,其解称为定常解。图1-13a和图1-13b分别给出了![]() 和
和![]() 两种情况下的振荡波形。在图1-13a上,初振幅大于定常振幅,初始阻尼是正的,它使振动逐步衰减,直到达到定常为止;与此相反,在图1-13b上,初振幅小于定常振幅,初始阻尼是负的,所以振动的振幅将逐步地增长,并趋近于定常振幅。
两种情况下的振荡波形。在图1-13a上,初振幅大于定常振幅,初始阻尼是正的,它使振动逐步衰减,直到达到定常为止;与此相反,在图1-13b上,初振幅小于定常振幅,初始阻尼是负的,所以振动的振幅将逐步地增长,并趋近于定常振幅。

图1-13 范德玻耳方程在小参数ε下的振荡波形
上述线性化方程解的主要结论是振动趋于一个定常振幅的周期振荡。从单摆的相图知道,定常振幅的周期振荡在相平面上是一条闭合轨线。于是我们依据线性化方程的解的结论,可以原则上给出在相平面(![]() )上范德玻耳方程的相轨线,图1-14所示就是取
)上范德玻耳方程的相轨线,图1-14所示就是取![]() =0.1时实际计算得到的相轨线。图1-14中那条较粗的闭合环线就是范德玻耳方程定常振幅的相轨线,它被称为极限环。当
=0.1时实际计算得到的相轨线。图1-14中那条较粗的闭合环线就是范德玻耳方程定常振幅的相轨线,它被称为极限环。当![]() 时,初始处在极限环内相点由于这时等效衰减系数
时,初始处在极限环内相点由于这时等效衰减系数![]() <0,系统作增幅振动,于是相图上的轨线从内向外并趋近于极限环。与此相反,当
<0,系统作增幅振动,于是相图上的轨线从内向外并趋近于极限环。与此相反,当![]() 时,初始处在极限环外相点由于这时等效衰减系数
时,初始处在极限环外相点由于这时等效衰减系数![]() >0,系统作减幅振动,于是轨线就从外向内逼近于极限环。由此可见极限环也是一类吸引子,它将环内与环外的相点吸引到环上。
>0,系统作减幅振动,于是轨线就从外向内逼近于极限环。由此可见极限环也是一类吸引子,它将环内与环外的相点吸引到环上。
我们还可以从能量平衡的观点对范德玻耳方程方程的极限环作进一步分析。实际上从方程(1-2-12)中的阻尼系数![]() 我们可以直接得出结论:当
我们可以直接得出结论:当![]() 时阻尼项为负的,当
时阻尼项为负的,当![]() 时阻尼项为正的。于是我们可以将相平面分成由
时阻尼项为正的。于是我们可以将相平面分成由![]() 为界的三个区域:
为界的三个区域:![]() 与
与![]() 区域为正阻尼区,在这两个区域内,轨线是向内收缩的;而
区域为正阻尼区,在这两个区域内,轨线是向内收缩的;而![]() 为负阻尼区,在这区域内轨线则是向外发散的。这意味着在振动过程中存在着能量的交换过程。如果我们对方程(1-2-12)进行一次积分:
为负阻尼区,在这区域内轨线则是向外发散的。这意味着在振动过程中存在着能量的交换过程。如果我们对方程(1-2-12)进行一次积分:
 (1-2-23)
(1-2-23)
式中E为积分常数,左边的第一项为动能K,第三项为势能V,而第二项为外界对系统作的功。考虑系统能量的变化有:
![]()
![]()
在系统达到定常态以后,一个周期内的平均能量没有变化,

=![]() =0
(1-2-24)
=0
(1-2-24)
满足方程(1-2-24)的条件是上式的积分为零,于是有:
![]()
就得到了与线性化方程(1-2-19)同样的结论:
![]()

图1-14 范德玻耳方程的相图
第三节 相图方法
1. 相轨线
从上面的讨论中看到,单摆的运动状态除用时间波形图表示外,还可以用相图的方法来表示。实际上许多重要的物理现象都可由非线性微分方程来描述,它们的运动状态都可用相图方法表示。因此我们需要将单摆运动的相图方法推广到一般系统,这就是本节要讨论的内容。
当以x作为变量时,小角度单摆方程可以写为:
![]() (1-3-1)
(1-3-1)
引进变数y:
![]() (1-3-2)
(1-3-2)
代入式(1-3-1),得:
![]() (1-3-3)
(1-3-3)
于是我们看到用二阶微分方程所描写的小角度单摆方程(1-3-1),可以改用方程(1-3-2)和方程(1-3-3)的两个一阶微分方程来描写。而且利用方程(1-3-2),方程(1-3-3)可以写为:
![]() (1-3-4)
(1-3-4)
对式(1-3-4)积分得:
![]() (1-3-5)
(1-3-5)
实际上方程(1-3-5)是与方程(1-1-9)相同的方程,只是采用了不同的变量来表示,两个方程都描写小角度单摆在相平面上的轨线是椭圆。
在一般情况下,一个非线性微分方程可以写为:
![]() (1-3-6)
(1-3-6)
利用式(1-3-2)引进变数y,则方程(1-3-6)可以用两个一阶方程代替:
 (1-3-7)
(1-3-7)
方程组(1-3-7)还可以写成更一般的形式:
 (1-3-8)
(1-3-8)
由方程组(1-3-8)消去dt,可以得到:
![]() (1-3-9)
(1-3-9)
由式(1-3-9)的积分,可以得到x,y的关系式。这些关系式给出原微分方程(1-3-6)的相轨线。例如式(1-3-5)给出了无阻尼单摆的相轨线的表达式。在x,y坐标平面的相平面上的每一个确定的相点代表了系统在给定时刻的运动状态。
2 平衡点的类型及其稳定性
由前面的讨论可以看到,系统的平衡点是相图上的一些特殊点,在数学上称为奇点。现在我们从一般性的非线性方程出发,看看奇点有那些基本的类型与特性。
一个系统的平衡点可以从下面推出:
 (1-3-10)
(1-3-10)
由此推得的平衡点坐标的更一般的形式:
 (1-3-11)
(1-3-11)
将式(1-3-8)对平衡点的邻域进行泰勒展开:
 (1-3-12)
(1-3-12)
引进新变数:
![]() ,
, ![]()
则式(1-3-8)可以表达为:
 (1-3-13)
(1-3-13)
式中:
![]()

![]()

如果忽略高阶项,则式(1-3-13)变为线性方程组:
 (1-3-14)
(1-3-14)
将方程组(1-3-14)变换为二阶微分方程形式,为此对(1-3-14)的第一式微分:
![]()
然后将方程组(1-3-14)第二式代入得:
![]()
而由方程组(1-3-14)第一式知:
![]()
因此得如下的二阶线性方程:
![]() (1-3-15)
(1-3-15)
基于方程上的相似性,我们可以采用与解阻尼单摆式(1-2-2)相同的方法来解式(1-3-15),即假定上式的解为:
![]()
式中J为常数,代入上式得下面的特征方程:
![]() (1-3-16)
(1-3-16)
我们还可以用另外一种方法推导特征方程(1-3-16)。将近似的线性方程组(1-3-14)写成矩阵形式

则由行列式
![]()
得
![]()
整理即得特征方程(1-3-16)。引入参数:
![]()
![]()
解式(1-3-16)得:
![]() (1-3-17)
(1-3-17)
即有:
 (1-3-18)
(1-3-18)
可见对于不同的参数p,q,即不同的A,B,C,D,式(1-3-15)的解有不同的形式。利用解(1-3-18) 来讨论平衡点类型还不十分方便,需作一次坐标变换。为此我们定义两个新变量x,h来对X,Y进行线性变换:
![]() (1-3-19)
(1-3-19)
在新的坐标系x,h中,方程组(1-3-14)变为:
 (1-3-20)
(1-3-20)
这样方程组(1-3-20)的解可以写为:
![]()
![]() (1-3-21)
(1-3-21)
进一步消去方程组(1-3-20)中的dt后得方程:
![]() (1-3-22)
(1-3-22)
解式(1-3-22)就可得(x,h)相平面上的相点关系:
![]() (1-3-23)
(1-3-23)
由式(1-3-21)或式(1-3-22),可以讨论方程组(1-3-20)在不同特征根时平衡点的类型及其附近的相轨线形式。
⑴ 结点
如特征根式(1-3-17)的根号中![]() ,则式(1-3-16)的解为两个实根。两个实根为同号的情况下,其平衡点称为结点。
,则式(1-3-16)的解为两个实根。两个实根为同号的情况下,其平衡点称为结点。
对于不同的![]() 值结点还有稳定与不稳定之分,结点附近的相轨线也有几种形式。图1-15为
值结点还有稳定与不稳定之分,结点附近的相轨线也有几种形式。图1-15为![]() 时的相轨线。由(1-3-21)可以见到,如果两个根均为负,则结点邻域的相点随时间趋近该点,因此该结点为稳定的。如果两个根均为正,则在结点邻域的相点随时间远离该点,因此为不稳定的结点。由(1-3-22)可见,当
时的相轨线。由(1-3-21)可以见到,如果两个根均为负,则结点邻域的相点随时间趋近该点,因此该结点为稳定的。如果两个根均为正,则在结点邻域的相点随时间远离该点,因此为不稳定的结点。由(1-3-22)可见,当![]() 时,这时的相轨线为一抛物线,如果
时,这时的相轨线为一抛物线,如果![]() ,抛物线相切于x轴,而
,抛物线相切于x轴,而![]() ,抛物线则趋近于h轴。
,抛物线则趋近于h轴。

图1-15 ![]() 时稳定与不稳定的结点
时稳定与不稳定的结点
a.![]() ,b.
,b.![]() ,c.
,c.![]() ,d.
,d.![]()
当![]() 时,这时的相轨线为通过平衡点的直线。如果
时,这时的相轨线为通过平衡点的直线。如果![]() ,如图1-16a所示,相轨线趋向平衡点,因此平衡点是一个稳定的结点;而当
,如图1-16a所示,相轨线趋向平衡点,因此平衡点是一个稳定的结点;而当![]() 时,则相轨线背离平衡点,如图1-16b所示,因此平衡点是一个不稳定结点。
时,则相轨线背离平衡点,如图1-16b所示,因此平衡点是一个不稳定结点。
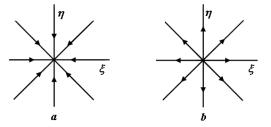
图1-16 ![]() 时稳定与不稳定的结点
时稳定与不稳定的结点
⑵ 鞍点
如果式(1-3-17)根号中![]() ,但两个实根为异的情况。这种情况下的相轨线为双曲线,因此其奇点为鞍点,如图1-17所示。我们知道,鞍点是不稳定的。但是有四条流线通过鞍点,其中流向鞍点的两条流线是稳定的,另外流离鞍点的两条流线是不稳定的。“鞍点”取名源于对该点特性的形象描述。一个严格沿马背脊梁骨滚动的小球可以到达该点,相当于流向鞍点的两条稳定流线,但是任何微小的偏离将使其沿马背的左边或右边滑走。鞍点指马鞍中心点,该点是沿马脊梁的最低点。在最低点与马脊梁垂直方向是离开鞍点的最有利方向,相当于流离鞍点的两条不稳定流线。
,但两个实根为异的情况。这种情况下的相轨线为双曲线,因此其奇点为鞍点,如图1-17所示。我们知道,鞍点是不稳定的。但是有四条流线通过鞍点,其中流向鞍点的两条流线是稳定的,另外流离鞍点的两条流线是不稳定的。“鞍点”取名源于对该点特性的形象描述。一个严格沿马背脊梁骨滚动的小球可以到达该点,相当于流向鞍点的两条稳定流线,但是任何微小的偏离将使其沿马背的左边或右边滑走。鞍点指马鞍中心点,该点是沿马脊梁的最低点。在最低点与马脊梁垂直方向是离开鞍点的最有利方向,相当于流离鞍点的两条不稳定流线。

图1-17 鞍点:a. ![]() ,b.
,b. ![]()
⑶ 焦点
如果![]() ,则式(1-3-15)的解为两个虚根,这时的奇点为焦点。这时可将式(1-3-17)写为:
,则式(1-3-15)的解为两个虚根,这时的奇点为焦点。这时可将式(1-3-17)写为:
![]()
式中![]() ,
,![]() 。当系统的特征根为复数时,如阻尼单摆的相图那样,这种情况下的相轨线是对数螺旋线,系统的平衡点称为焦点。焦点也有稳定与不稳定之分。当实部为负值时,与阻尼单摆情况相同,系统的平衡点是螺旋线簇的渐近点。当时间t→∞时,螺旋线簇趋近于它,这样的焦点是稳定的,如图1-18a所示;当实部为正值时,系统从平衡点发散开来,这时的焦点是不稳定的,如图1-18b所示。可见实部的大小了代表螺旋线半径的增长或衰减速度,特征根虚部的大小则代表了轨线的转动速度。
。当系统的特征根为复数时,如阻尼单摆的相图那样,这种情况下的相轨线是对数螺旋线,系统的平衡点称为焦点。焦点也有稳定与不稳定之分。当实部为负值时,与阻尼单摆情况相同,系统的平衡点是螺旋线簇的渐近点。当时间t→∞时,螺旋线簇趋近于它,这样的焦点是稳定的,如图1-18a所示;当实部为正值时,系统从平衡点发散开来,这时的焦点是不稳定的,如图1-18b所示。可见实部的大小了代表螺旋线半径的增长或衰减速度,特征根虚部的大小则代表了轨线的转动速度。

图1-18 a.稳定的焦点,b.不稳定焦点
⑷ 中心点
当特征方程的两个虚根的实部![]() 等于零时,则这时螺旋线的矢径不随时间变化,相轨线成为围绕着平衡点的是封闭的曲线族,系统的平衡点成了封闭轨线曲线族的中心,称为“中心点”,中心点附近的封闭的椭圆曲线,代表系统作周期运动。根据虚部的正负不同,相轨线上的相点可以是顺时的或逆时的方向转动。根据稳定性的定义,周期运动满足稳定性的两个条件,因而中心点是稳定的的平衡点。我们讨论在无阻尼单摆的自由振荡时已经看到,这个中心点是椭圆点,是稳定的不动点。
等于零时,则这时螺旋线的矢径不随时间变化,相轨线成为围绕着平衡点的是封闭的曲线族,系统的平衡点成了封闭轨线曲线族的中心,称为“中心点”,中心点附近的封闭的椭圆曲线,代表系统作周期运动。根据虚部的正负不同,相轨线上的相点可以是顺时的或逆时的方向转动。根据稳定性的定义,周期运动满足稳定性的两个条件,因而中心点是稳定的的平衡点。我们讨论在无阻尼单摆的自由振荡时已经看到,这个中心点是椭圆点,是稳定的不动点。
最后,我们在参数p, q平面上来讨论一下根![]() 的分布。在p, q平面上各类奇点的情况如图1-19所示。首先,在p, q平面的下半部分,这里是
的分布。在p, q平面上各类奇点的情况如图1-19所示。首先,在p, q平面的下半部分,这里是![]() 的区域,因此在这个区域内的奇点是鞍点。而在p, q平面上半部情况比较复杂,这里由抛物线
的区域,因此在这个区域内的奇点是鞍点。而在p, q平面上半部情况比较复杂,这里由抛物线![]() 将上半部分为四个区。其中抛物线
将上半部分为四个区。其中抛物线![]() 将第一象限划分成稳定的结点(
将第一象限划分成稳定的结点(![]() )与稳定的焦点(
)与稳定的焦点(![]() )两部分。而抛物线
)两部分。而抛物线![]() 将第二象限划分成不稳定的结点(
将第二象限划分成不稳定的结点(![]() )与不稳定的焦点(
)与不稳定的焦点(![]() )两部分。最后在正q轴上,这里p = 0,根
)两部分。最后在正q轴上,这里p = 0,根![]() 的实部等于零,它是纯虚数,因此平衡点是中心点,围绕中心点附近的轨线是椭圆。
的实部等于零,它是纯虚数,因此平衡点是中心点,围绕中心点附近的轨线是椭圆。

图1-19 p,q平面上各类奇点的分布
第四节 受迫振荡
1.线性单摆的受迫振动
一个单摆如受到一周期驱动力矩作用而摆动起来,称为受迫振动。设单摆的摆线长度为l,摆锤质量为m,周期驱动力为![]() ,f为驱动力矩振幅,
,f为驱动力矩振幅,![]() 为驱动力频率。为普遍化起见,取单摆的摆角
为驱动力频率。为普遍化起见,取单摆的摆角![]() ,则在小摆角条件下周期驱动力作用下的单摆方程有:
,则在小摆角条件下周期驱动力作用下的单摆方程有:
![]() (1-4-1)
(1-4-1)
式中![]() 为无量纲阻尼系数,
为无量纲阻尼系数,![]() 相对驱动力矩,
相对驱动力矩,![]() 为系统的自振动频率。
为系统的自振动频率。
方程(1-4-1)为一非齐次线性微分方程,它的通解等于相应的齐次线性微分方程的通解和这个非齐次线性微分方程的一个特解之和。在研究线性阻尼单摆时,我们已获得过齐次线性微分方程的通解:
![]() (1-4-2)
(1-4-2)
![]()
![]() 无阻尼线性单摆的自振频率。为了求得方程(1-4-1)的特解,将周期驱动力写成指数形式:
无阻尼线性单摆的自振频率。为了求得方程(1-4-1)的特解,将周期驱动力写成指数形式:![]() ,于是周期驱动力作用下的单摆方程(1-4-1)写为:
,于是周期驱动力作用下的单摆方程(1-4-1)写为:
![]() (1-4-3)
(1-4-3)
设方程(1-4-3)具有如下形式的特解:
![]() (1-4-4)
(1-4-4)
对t求导两次:
![]() ,
, ![]()
将x(t)及其一阶、二阶导数代入方程(1-4-3),在消去公因子![]() 后得代数方程:
后得代数方程:
![]()
由此得:
![]() (1-4-5)
(1-4-5)
将式(1-4-5)的分母写成指数形式:
![]()
式中
![]() ,
,![]() (1-4-6)
(1-4-6)
代入式(1-4-5)得:
![]()
将P代入式(1-4-3),得方程的特解为:
![]()
取上式的实数部分,于是有:
![]()
代入r、j 以后方程(1-4-3)的特解可以写为:
 (1-4-7)
(1-4-7)
将式(1-4-7)与(1-4-2)相加得非齐次线性微分方程(1-4-1)的通解为:
![]()
= (1-4-8)
(1-4-8)
式(1-4-8)是振动系统的振动特性与驱动力间的关系式,称为频率特性。注意到其第一项是随时间衰减的,在经过一段时间之后这一项将衰减到可以忽略的程度,这个衰减过程常称为系统的过渡过程,最后仅剩下第二部分。因此我们也可只讨论第二部分的特性。
由式(1-4-8)可见,系统的频率特性除与驱动力幅度及频率有关外,还与系统得阻尼系数![]() 有关。幅频特性可以写为:
有关。幅频特性可以写为:
 (1-4-9)
(1-4-9)
由式(1-4-9)可见,在某一驱动频率下振动幅度可达到最大值,称为共振,相应的驱动频率称为共振频率![]() 。将式(1-4-9)分母的根号下的表达式对
。将式(1-4-9)分母的根号下的表达式对![]() 求导并令其等于零:
求导并令其等于零:
![]()
得共振频率nr:
![]() (1-4-10)
(1-4-10)
可见当存在阻尼时共振频率nr小于系统的自振频率,但在小阻尼下两者相差不大。共振时的最大振幅![]() 为:
为:
![]()
相频特性为
![]()
图1-22给出了三个不同![]() 下的幅频特性曲线。由图可见,阻尼系数
下的幅频特性曲线。由图可见,阻尼系数![]() 愈小,特性曲线愈尖锐,共振频率
愈小,特性曲线愈尖锐,共振频率![]() 也愈趋近于单摆的自振动频率
也愈趋近于单摆的自振动频率![]() 。
。
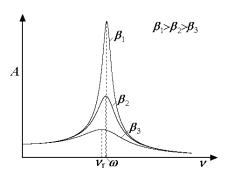
图1-20 不同b下的幅频特性曲线
2. 杜芬方程的受迫振动
杜芬方程是一类典型的力学问题,因此受到广泛的重视。一个标准杜芬方程的形式可写为:
![]() (1-4-11)
(1-4-11)
其中![]() 可取零,正或负,
可取零,正或负,![]() 可取正或负。对于以杜芬方程描述的非线性弹簧系统,如硬弹簧系统,
可取正或负。对于以杜芬方程描述的非线性弹簧系统,如硬弹簧系统,![]() 与
与![]() 均取正,而软弹簧系统,
均取正,而软弹簧系统,![]() 取正
取正![]() 取负。
取负。
不失一般性,我们研究一个由受驱弱非线性单摆演化得到的杜芬振子方程,即取单摆方程中sinq的级数展开式的前两项,得:
![]() (1-4-12)
(1-4-12)
![]() 为单摆的自振频率。与方程(1-4-11)相比,这里系数
为单摆的自振频率。与方程(1-4-11)相比,这里系数![]() ,
,![]() 。
。
因为方程(1-4-12)是非线性方程只能采用近似解法。近似解法有多种,有一种称为渐近解法,根据这种解法方程(1-4-12)的一次近似解可以写为:
![]()
式中A,j为待定常数。它们由下述方程组求出:
 (1-4-13)
(1-4-13)
其中,
![]()
方程组(1-4-13)积分后:
 (1-4-14)
(1-4-14)
但是方程组(1-4-14)仍然是一个非线性微分方程组,精确求解仍很困难,但可对它在稳态情况下的解进行讨论,即:
![]() 0,
0,![]()
于是有:
![]() (1-4-15)
(1-4-15)
![]() (1-4-16)
(1-4-16)
引入符号:
![]()
![]() 称为系统的等效自振频率。该式表明,系统的等效自振频率
称为系统的等效自振频率。该式表明,系统的等效自振频率![]() 将随振幅的增加而减小。实质上这与第一章讨论的单摆振动周期随摆幅变化而变化的现象是一致的。引入了
将随振幅的增加而减小。实质上这与第一章讨论的单摆振动周期随摆幅变化而变化的现象是一致的。引入了![]() 以后,方程式(1-4-16)变为:
以后,方程式(1-4-16)变为:
![]() (1-4-17)
(1-4-17)
为简单起见,考虑近共振情况,在此条件下有![]() ,
,![]() 。此时,式(1-4-15)与(1-4-17)变为:
。此时,式(1-4-15)与(1-4-17)变为:
 (1-4-18)
(1-4-18)
利用三角公式,从方程组(1-5-18)消去j,经整理可得到与线性驱动单摆共振区附近振幅表达式(1-4-9)非常相似的公式:
 (1-4-19)
(1-4-19)
可见式(1-4-19)与式(1-4-9)的最主要差别是:受驱线性单摆的自振频率是常数![]() ,而受驱杜芬方程(非线性单摆)的等效自振频率
,而受驱杜芬方程(非线性单摆)的等效自振频率 ![]() 是随振幅的增加而减小的。
是随振幅的增加而减小的。
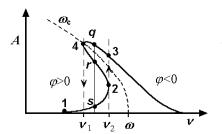
图1-21 杜芬方程主共振的频率特性曲线,
当![]() 在区间时有三个共振解
在区间时有三个共振解
图1-21给出了杜芬方程主共振的频率特性曲线,图中的虚线为![]() 随振幅增加而减小曲线,称为主共振骨架线。由图可见,由于自振频率
随振幅增加而减小曲线,称为主共振骨架线。由图可见,由于自振频率![]() 随振幅增加而减小,从而使特性曲线的共振峰发生了“倾倒”现象。由于这种“倾倒”,特性曲线在
随振幅增加而减小,从而使特性曲线的共振峰发生了“倾倒”现象。由于这种“倾倒”,特性曲线在![]() 的左侧形成了S形曲线。正是由于S形曲线的出现导致了非线性系统共振中的许多重要的异常现象:
的左侧形成了S形曲线。正是由于S形曲线的出现导致了非线性系统共振中的许多重要的异常现象:
⑴自动限幅现象
我们知道,当驱动力与线性振动系统共振出现与时,即振动幅度将增加到一个极大值,尤其是在无阻尼(![]() )情况下,其振动幅度会出现趋向无穷大的现象。然而由式(1-4-19)可见,杜芬方程在共振
)情况下,其振动幅度会出现趋向无穷大的现象。然而由式(1-4-19)可见,杜芬方程在共振![]() 时振幅A等于一有限值:
时振幅A等于一有限值:
![]()
其原因是在振幅增加的同时,自振频率![]() 在减小,于是共振条件
在减小,于是共振条件![]() 将受到牵制,于是振幅的增加受到限制,即出现自动限幅现象。
将受到牵制,于是振幅的增加受到限制,即出现自动限幅现象。
⑵多值共振解现象
由式(1-4-19)也可以写成:
 (1-4-20)
(1-4-20)
根据n值大小的不同,在特性曲线上满足![]() 共振条件的分成了三个区域。由图1-21所示,在
共振条件的分成了三个区域。由图1-21所示,在![]() 与
与![]() 的两个区域,共振解是单值的;而在
的两个区域,共振解是单值的;而在![]() 区域,一个
区域,一个![]() 值对应着三个A值,即共振解有三个,如图中的q,r,s三个解。
值对应着三个A值,即共振解有三个,如图中的q,r,s三个解。
⑶跳跃反相现象
由式(1-4-17),可得振动的相位角:
![]() (1-4-21)
(1-4-21)
式(1-4-21)指出,当![]() 时,j
= 0,共振解落在共振骨架线上;当
时,j
= 0,共振解落在共振骨架线上;当![]() 时,j
< 0;当
时,j
< 0;当![]() 时,j
> 0。这种现象称为跳跃反相。设驱动力振幅F保持常数,而驱动力频率n由小到大值缓慢增加,这时振幅逐渐增加,即共振点由1运动至2。然而在到达点2后,如再继续增加n值,则振幅A发生向上跳变,由点2跳到点3,并伴随着解x的相位反相。再继续增加n值,则振幅逐渐减少。当n值由大到小减少时,开始振幅逐渐递增加,在到达点4后,再继续减小n值时,振幅又发生一次跳变到低值,振幅由4一下跳到最低值,同时振动相位又将出现一次反相。
时,j
> 0。这种现象称为跳跃反相。设驱动力振幅F保持常数,而驱动力频率n由小到大值缓慢增加,这时振幅逐渐增加,即共振点由1运动至2。然而在到达点2后,如再继续增加n值,则振幅A发生向上跳变,由点2跳到点3,并伴随着解x的相位反相。再继续增加n值,则振幅逐渐减少。当n值由大到小减少时,开始振幅逐渐递增加,在到达点4后,再继续减小n值时,振幅又发生一次跳变到低值,振幅由4一下跳到最低值,同时振动相位又将出现一次反相。
2.2 杜芬方程的多值共振解的稳定性
我们在杜芬方程的研究中看到,非线性系统的解是多值的,特别是在图1-21所示的频率特性曲线上,在![]() 间存在三个共振解。但是这三个的稳定性如何呢?需要作通过分析以后才能确定。对于这些共振解的稳定性可以根据克雷洛夫与博戈留博夫提出的判据来确定。在驱动振幅不变的情况下,该判据如下:若共振解落在
间存在三个共振解。但是这三个的稳定性如何呢?需要作通过分析以后才能确定。对于这些共振解的稳定性可以根据克雷洛夫与博戈留博夫提出的判据来确定。在驱动振幅不变的情况下,该判据如下:若共振解落在![]() 区域,则该解的稳定性条件为:
区域,则该解的稳定性条件为:
![]()
否则解是不稳定的;若共振解落在![]() 区域,则该解的稳定性条件为:
区域,则该解的稳定性条件为:
![]()
否则解是不稳定的。
以这两个判据来衡量图1-21中的q,r,s三个解可见,解q,s是稳定的,而解r则是不稳定的。
我们已经知道相图上与稳定解对应平衡点是椭圆点,而与不稳定解对应的点是双曲点,或称鞍点。为了明白起见,应该给出杜芬振子的相图。为简单起见,我们研究无阻尼情况,![]() =0,令ω=1,则方程(1-4-10)变为:
=0,令ω=1,则方程(1-4-10)变为:
![]() (1-4-22)
(1-4-22)
为了讨论共振解的稳定性,现在用另外的方法来解方程(1-4-22)。设方程(1-4-22)的主共振解与自由单摆解(1-1-6)的形式相类似,即:
![]() (1-4-23)
(1-4-23)
与解(1-1-6)不同,解(1-4-23)中的参数a(t)、b(t)为时间的函数。
设与驱动周期T(=![]() )的时间相比,振幅a(t)、b(t)的变化是十分缓慢的,以致有:
)的时间相比,振幅a(t)、b(t)的变化是十分缓慢的,以致有:
![]() (1-4-24)
(1-4-24)
对式(1-4-23)进行微分,并考虑到条件(1-4-24),有:
![]() (1-4-25)
(1-4-25)
![]() (1-4-26)
(1-4-26)
考虑到方程(1-4-22)中x(t)的立方项,因此取式(1-4-23)的三次乘方,即:
![]()
![]() (1-4-27)
(1-4-27)
鉴于三次谐波函数项与前面两项相比一般是一个小项,因此予以忽略。
将式(1-4-25)、式(1-4-26)与式(1-4-27)一起代入到方程(1-4-22)中,并令方程的同谐波的系数相等,则有:
![]() (1-4-28a)
(1-4-28a)
![]() (1-4-28b)
(1-4-28b)
与渐近法的方程(1-4-13)相类似,方程组(1-4-28)仍然是一个非线性微分方程组,可以只考虑稳态情况下的解,即:
![]()
在此条件下有:
![]() (1-4-29a)
(1-4-29a)
![]() (1-4-29b)
(1-4-29b)
方程组(1-4-29)的联立解为:
 (1-4-30)
(1-4-30)
方程组(1-4-30)说明,解(1-4-23)只有余弦分量。在![]() 时a的解是单值的,而在
时a的解是单值的,而在![]() 时,a则有三个解
时,a则有三个解![]() 、
、![]() 、
、![]() ,用作图的方法可以容易地获得三个解,如图1-22所示。它们与图1-21的三个解相对应,解
,用作图的方法可以容易地获得三个解,如图1-22所示。它们与图1-21的三个解相对应,解![]() 、
、![]() 是稳定的,
是稳定的,![]() 是不稳定的。
是不稳定的。
现在以解(1-4-23)中的振幅a、b为坐标平面作相图,称为范德玻耳平面相图。由解(1-4-30)知,三个解的b坐标均为零,因此无阻尼杜芬振子的三个解均在a轴上。围绕三个解的轨线如图1-23所示。与稳定解![]() 、
、![]() 对应的是椭圆点,与不稳定解
对应的是椭圆点,与不稳定解![]() 对应的是双曲点。通过不稳定解
对应的是双曲点。通过不稳定解![]() 的环线为将平面分成两个“低洼”区域。一个是以解
的环线为将平面分成两个“低洼”区域。一个是以解![]() 为中心,图中的阴影区是其盆区;另一个以解
为中心,图中的阴影区是其盆区;另一个以解![]() 为中心,是由环线分离出来的另一个盆区。
为中心,是由环线分离出来的另一个盆区。
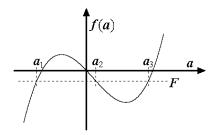
图1-22 无阻尼杜芬振子的三个解
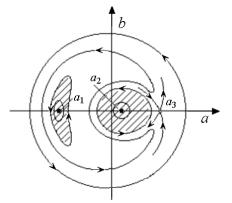
图1-23 范德玻耳平面上无阻尼杜芬振子的轨线
再看有阻尼的情况。这时即使上述的数学近似解也不可能得到了,唯一的办法是用计算机进行数值解。取阻尼系数![]() ,驱动力振幅
,驱动力振幅![]() ,以及驱动力频率
,以及驱动力频率![]() 。数值计算得到的相图如图1-24所示,可见除解
。数值计算得到的相图如图1-24所示,可见除解![]() 外,其余两个解的b坐标已不再为零。但是三个解的稳定性质没有改变,解
外,其余两个解的b坐标已不再为零。但是三个解的稳定性质没有改变,解![]() 、
、![]() 是稳定的,解
是稳定的,解![]() 是不稳定的。因此解
是不稳定的。因此解![]() 、
、![]() 是两个吸引子,其周围的轨线呈螺旋线。相图上的点分别进入两个不同的吸引子(
是两个吸引子,其周围的轨线呈螺旋线。相图上的点分别进入两个不同的吸引子(![]() 或
或![]() ),具体进入哪个吸引子由初始条件决定。如图所示,两个相邻相点往往会进入不同的吸引子。
),具体进入哪个吸引子由初始条件决定。如图所示,两个相邻相点往往会进入不同的吸引子。

图1-24 范德玻耳平面上阻尼杜芬振子的轨线
3 庞加莱映射
我们已经看到,利用庞加莱建立的相空间方法,可以把系统的运动状态形象地描绘出来,给动力学研究带来了极大的方便。但是随着阻尼力与驱动力的加入,即使是简单的单摆,其相图也会变得越来越复杂。例如,在弱驱动力作用下的弱阻尼单摆(杜芬方程)的共振讨论中,我们看到即使驱动力很小,相图已发生很大变化。再者在讨论主共振时,我们只计及了![]() 个项的贡献[如式(1-4-27)],而忽略了其中的三次
个项的贡献[如式(1-4-27)],而忽略了其中的三次![]() 谐波项。当驱动频率满足
谐波项。当驱动频率满足![]() 条件时,那么我们也能实现驱动力与系统之间的共振,这就是分频共振。一般说来,如果非线性系统与外加的驱动力之间存在:
条件时,那么我们也能实现驱动力与系统之间的共振,这就是分频共振。一般说来,如果非线性系统与外加的驱动力之间存在:
![]()
式中P,R为一整数,就将出现共振,![]() 时为分频共振,
时为分频共振,![]() 时为倍频共振。由此可见,当一个非线性系统存在分频或倍频共振,而且驱动力又不是很小的情况,分析起来就异常复杂了,以至简单的相图方法根本无能为力。
时为倍频共振。由此可见,当一个非线性系统存在分频或倍频共振,而且驱动力又不是很小的情况,分析起来就异常复杂了,以至简单的相图方法根本无能为力。
为了分析相空间中的复杂轨线,庞加莱在相空间分析中发展了一种截面方法。该方法是在相空间里取某一坐标为常数的截面,通过研究相轨线与该截面的交点来分析系统动力学的复杂行为。设相空间是n维的,原则上可以取出一个(![]() )维的相平面,称为庞加莱截面。人们就可通过相轨线留在截面上的点所组成的图象来掌握复杂的轨线情况,如图1-25所示。人们将这种时间上连续的运动转变为离散的图象处理方法称为庞加莱映射。
)维的相平面,称为庞加莱截面。人们就可通过相轨线留在截面上的点所组成的图象来掌握复杂的轨线情况,如图1-25所示。人们将这种时间上连续的运动转变为离散的图象处理方法称为庞加莱映射。

图1-25 庞加莱截面
为了具体了解庞加莱截面的应用,我们还从熟悉的单摆运动开始。在频率为n的周期驱动力![]() 作用下,阻尼单摆的运动方程为:
作用下,阻尼单摆的运动方程为:
![]() (1-4-31)
(1-4-31)
加进一个位相![]() 自变量,使之化为不显含时间t的自治系统:
自变量,使之化为不显含时间t的自治系统:
![]() ,
,
![]() ,
,
![]()
于是就得到了描述单摆的三维相空间(图1-26)。由于相角具有![]() 的周期性,因此可以把相图1-26a上的
的周期性,因此可以把相图1-26a上的![]() =
=![]() 和
和![]() 处连接起来,这样描写单摆运动的相空间就变成图1-26b所示的圆环了。原来在图l-2上的单摆的园形轨线,现在成了附着在圆环面上的环线。当我们取某一个常数位相,例如
处连接起来,这样描写单摆运动的相空间就变成图1-26b所示的圆环了。原来在图l-2上的单摆的园形轨线,现在成了附着在圆环面上的环线。当我们取某一个常数位相,例如![]() ,就等于在该位相处截取了一个平面,环线在穿过该平面时就留下了一个点。如果运动是单周期的,在周期性的运动过程中轨线每次都重复地运行在原有的轨道上,因此它总是在截面的同一位置穿过,在截面上只留下一个点。如果运动是两倍周期的,在每个周期内相轨线有两次在截面上的不同位置上穿过,因此留下两个点;同样,如果是四倍周期的运动,在截面上留下四个点,等等。如果运动是无周期的,则轨线每次都在截面上的不同点穿过,于是截面上留下无穷多个点。
,就等于在该位相处截取了一个平面,环线在穿过该平面时就留下了一个点。如果运动是单周期的,在周期性的运动过程中轨线每次都重复地运行在原有的轨道上,因此它总是在截面的同一位置穿过,在截面上只留下一个点。如果运动是两倍周期的,在每个周期内相轨线有两次在截面上的不同位置上穿过,因此留下两个点;同样,如果是四倍周期的运动,在截面上留下四个点,等等。如果运动是无周期的,则轨线每次都在截面上的不同点穿过,于是截面上留下无穷多个点。
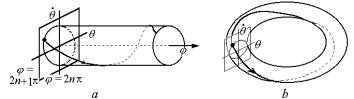
图1-26 a-扩展的单摆三维相空间,b-单摆的圆环三维相空间

图1-27 圆环三维相空间与庞加莱截面
一个被等时冲击转子的相轨线,它逐圈地画出了转子的混沌行为。下图
是画了1000圈后的轨线图。右下角是庞加莱截面显示出的内部结构
庞加莱映射对于分析复杂运动是非常有用的,因为无周期的复杂运动会在截面上留下由点构成的某种独特结构。例如一个在驱动力作用下沿圆圈摆动的转子,它的相图有一个下面要讨论到的奇怪吸引子。所谓“奇怪”,就是它既是吸引子而相空间上的相点又永远达不到该吸引子上。于是,相轨线绕着该吸引子一圈又一圈地不仃地转动,结果相空间里的轨线越来越复杂。图1-27中间的那一团相轨线就是在绕了1000圈后在该吸引子附近的形状,显然我们已理不清其中的头绪了。图右下角是该团相轨线的庞加莱截面图,这里图形不仅简单得多,而且显示出某种结构。由庞加莱截面图可见,受驱转子的相轨线尽管极其复杂,但它不是毫无规律的,而是具有某种内在的规律性在内。在以后讨论中我们还要多次接触到庞加莱截面,其画法与这里讲的方法相类似。
4. 初识单摆的复杂运动
运用上面讨论的相图与庞加莱映射,我们可以初步来看一下单摆运动的复杂行为了。如上所述,在频率为n 的周期驱动力![]() 作用下,阻尼单摆的运动方程为:
作用下,阻尼单摆的运动方程为:
![]() (1-4-31)
(1-4-31)
式中b为无量纲阻尼系数、![]() 为相对驱动频率、F为驱动力矩,它们都是约化值。
为相对驱动频率、F为驱动力矩,它们都是约化值。
首先我们预计,在很小驱动力作用下单摆应该作简单的周期运动,因为当![]() 时由方程(1-4-31)可见单摆作自由振动。因此当静止单摆在很小幅度的驱动力作用下,它仅作小幅度的周期振动。在小驱动力作用下利用小摆角近似,
时由方程(1-4-31)可见单摆作自由振动。因此当静止单摆在很小幅度的驱动力作用下,它仅作小幅度的周期振动。在小驱动力作用下利用小摆角近似,![]() ,式(1-4-31)变为非齐次线性微分方程:
,式(1-4-31)变为非齐次线性微分方程:
![]() (1-4-32)
(1-4-32)
由前面解线性单摆的受迫振动(1-4-1)知道,方程(1-4-32)在经过一段过渡时间之后的解为:
 (1-4-33)
(1-4-33)
式中![]() ,该式说明小驱动力单摆以驱动频率作振动。取上式时间的导数有:
,该式说明小驱动力单摆以驱动频率作振动。取上式时间的导数有:
 (1-4-34)
(1-4-34)
合并(1-4-33)与(1-4-34)两式,得小驱动力阻尼单摆的相轨线方程:
 (1-4-35)
(1-4-35)
这是一个椭圆方程。可见在小驱动力下单摆的相轨线是闭合的椭圆曲线,其形式与无驱动无阻尼单摆的相轨线相类似(参见图1-3),说明小驱动力受驱阻尼单摆方程存在一个周期吸引子。
由式(1-4-35)可见,在驱动频率![]() 及阻尼力系数
及阻尼力系数![]() 为定值时,椭圆的半径是随驱动力矩F的增大而增大的。然而随着驱动力矩的增加,相轨曲线半径的增大意味着摆角的增大。于是
为定值时,椭圆的半径是随驱动力矩F的增大而增大的。然而随着驱动力矩的增加,相轨曲线半径的增大意味着摆角的增大。于是![]() 的小摆角近似已不再适用,象式(1-4-35)那样的相轨线表达式将无法得到,进一步的分析只能通过数值计算来完成了。
的小摆角近似已不再适用,象式(1-4-35)那样的相轨线表达式将无法得到,进一步的分析只能通过数值计算来完成了。
为确定起见在对方程(1-4-31)进行计算机编程计算中,取b=1/4,![]() =2/3为固定值,F由小到大取一系列的数值。计算结果首先发现,随着驱动力矩的增加摆角随之增大,当
=2/3为固定值,F由小到大取一系列的数值。计算结果首先发现,随着驱动力矩的增加摆角随之增大,当![]() 时一方面偏离了原来的椭圆形状,而且在
时一方面偏离了原来的椭圆形状,而且在![]() 以后闭合的相轨线变得左右不对称了,一边尖一边圆象个鸡蛋形状,具体出现那种形状与所取的初始条件(
以后闭合的相轨线变得左右不对称了,一边尖一边圆象个鸡蛋形状,具体出现那种形状与所取的初始条件(![]() ,
,![]() )有关。图1-28 给出了
)有关。图1-28 给出了![]() 时在不同初始条件下这样的两条相轨线。说明在
时在不同初始条件下这样的两条相轨线。说明在![]() 附近单摆运动发生了对称性破缺。不过这时单摆仍作简单的单周期运动,在庞加莱截面上是一个单点,闭合的相轨线是其周期吸引子。
附近单摆运动发生了对称性破缺。不过这时单摆仍作简单的单周期运动,在庞加莱截面上是一个单点,闭合的相轨线是其周期吸引子。
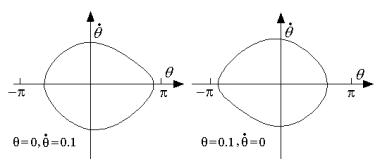
图1-28 ![]() 下在不同初始条件下的两条的相轨线
下在不同初始条件下的两条的相轨线
当驱动力继续上升时运动将复杂化起来。图1-29是当![]() 时的相图与庞加莱截面。从图1-29a的相图来看,相轨线在[
时的相图与庞加莱截面。从图1-29a的相图来看,相轨线在[![]() ]的单摆势谷范围内或疏或密地来回环绕,但始终无法达到周期重复的状态。图1-29b的庞加莱截面上的图形显然要比相平面上的图形简单得多了。我们注意到庞加莱截面上的相点都处线上,因此可以认定系统这时处于准周期运动状态。庞加莱截面上的图形与所取截面的位置(即相角
]的单摆势谷范围内或疏或密地来回环绕,但始终无法达到周期重复的状态。图1-29b的庞加莱截面上的图形显然要比相平面上的图形简单得多了。我们注意到庞加莱截面上的相点都处线上,因此可以认定系统这时处于准周期运动状态。庞加莱截面上的图形与所取截面的位置(即相角![]() )有关,图1-29b是取相角为
)有关,图1-29b是取相角为![]() 时的图形。
时的图形。
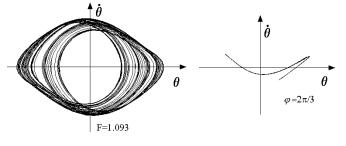
a b
图1-29 阻尼受驱单摆在![]() 时的相图(a)与庞加莱截面(b)
时的相图(a)与庞加莱截面(b)
随着驱动力的继续增加,系统的运动将进入更为复杂的状态。图1-30是F增加到1.15的情况。与![]() 的情况相比,这时相轨线不再限于在[
的情况相比,这时相轨线不再限于在[![]() ]的单摆的中心势谷范围内环绕,而是扩展到中心势谷[
]的单摆的中心势谷范围内环绕,而是扩展到中心势谷[![]() ]左边或右边的
]左边或右边的![]() 各个单摆势谷范围。它会在一个势谷内绕上几圈,然后随机地进入到相邻的势谷内再绕上几圈,如此往复不已。图1-30a是相轨线在相邻的三个单摆势谷[
各个单摆势谷范围。它会在一个势谷内绕上几圈,然后随机地进入到相邻的势谷内再绕上几圈,如此往复不已。图1-30a是相轨线在相邻的三个单摆势谷[![]() ]、[
]、[![]() ]、[
]、[![]() ]内的环绕情况。图1-30b是在相邻的三个单摆势谷内庞加莱截面上的图象。
]内的环绕情况。图1-30b是在相邻的三个单摆势谷内庞加莱截面上的图象。
综上所述,受驱单摆的运动状态有如下特点:
⑴在小驱动力下,单摆作规则的周期运动。当驱动力矩增加到某—临界值时,单摆从周期的运动状态进入随机运动状态,这种状态常被称为混沌。
⑵混沌状态并不是混乱一片。从相图上看,相轨线的分布虽然弥散开来,但并不均匀地分布到整个区间,而是有疏有密地分布着。在庞加来截面上,起始时相点虽然随机地分布着,然而在足够长的时间以后,一种由相点描绘的内部结构逐步地显露出来。这些情况说明,混沌具有非常丰富的内部结构层次。
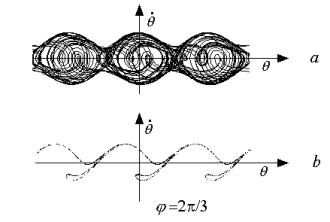
图1-30 阻尼受驱单摆在![]() 时的相图(a)与庞加莱截面(b)
时的相图(a)与庞加莱截面(b)
主要参考文献
1.R.Z.Sagdeev, Nonlinear physics, Harword Academic Publishers, London,1988
2.D.Kaplan, L.Glass, Understanding Nonlinear Dynamics, Springer-Verlag, 1995
3.H.G. Schuster, Deterministic Chaos, Springer-Verlag, 1984
4.J. Guckenheimer, P. Holmes, Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Springer-Verlag, 1983
5.D.W. Jordan, P. Smith, Nonlinear Ordinary Differential Equations, Claredon Press, 1977
6.A.H. 奈弗,D.T. 穆克,非线性振动,高等教育出版社,1980
7.A.A. 安德罗诺夫,A.A. 维特,C.Э. 哈依金,振动理论,科学出版社,1973
8.项国波,非线性系统,知识出版社,1991
9.赵凯华,罗蔚茵,新概念物理教程―力学,高等教育出版社,1995
10.赵凯华,从单摆到混沌,物理学知识,1993 No.4―6,1994 No.1―2